@[toc]
动态规划-Introduction
1.了解动态规划
灵活: 动态规划题目中类型丰富,套路代码较少,专杀"过拟合的神经网络"们!
质量: 问题中的阶段划分,状态设计,状态之间转移以及一些边界都是需要自己思考的
简单: 代码质量不高,想到合适的思路后可以快速实现,字里行间都能体现出水平
2.基本术语
1.基本概念,统一一下术语.
- 动态规划:运筹学中的一个分支,是求解决策过程最优化的数学方法.
- 阶段:把所给求解问题的过程恰当地分成若干个相互联系的阶段.
- 状态:状态表示每个阶段开始面临的自然状况或客观条件
- 决策(转移):一个阶段的状态给定以后,从该状态演变到下一个阶段某个状态的一种选择成为决策.
- 策略:每个阶段都要做一个决策,一系列决策的集合.
- 边界: 初始集合.
2.动态规划的状态设计
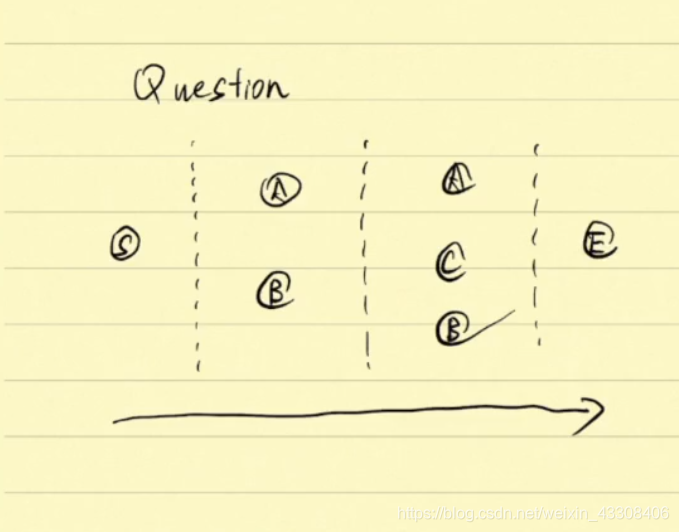
其实包含两步:阶段划分与状态设计,这两部分的关系又非常紧密,所以面对问题的时候放在一起思考,统称为状态设计。简单来说,我们把原问题划分成若干个不相交的部分,这每一个部分就是一个阶段,而具体看每一个阶段的时候,需要一些信息来刻画阶段中不同的情况。不同的情况就是状态,刻画情况的信息就是状态的表示。
这样看上去,阶段和状态似乎没有什么区别,都是用来描述问题不同情况的。这时候就需要决策上场了。决策,对应动态规划中的状态转移,一个决策可以从一个阶段的状态演变到另一个 不同 阶段的状态中去,如果将阶段看成是点,决策看成是连在阶段间的有向边,那么这两个东西一定组成的是一个 DAG(有向无环图)。这也是保证了动态规划问题的优秀复杂度,即同一个状态不会直接 / 间接的更新自己。
这样说起来,很是抽象,我们举一个简单的例子,并用动态规划的方法来分析这件事情。 吃完饭,WNJXYK 想要和 VineAsh 一起去看电影。那么他要处理几个问题:
- 电影票:他可以出发前网上订票 / 到电影院现场买票
- 清洁餐具:出发前洗碗 / 看电影后回家洗碗
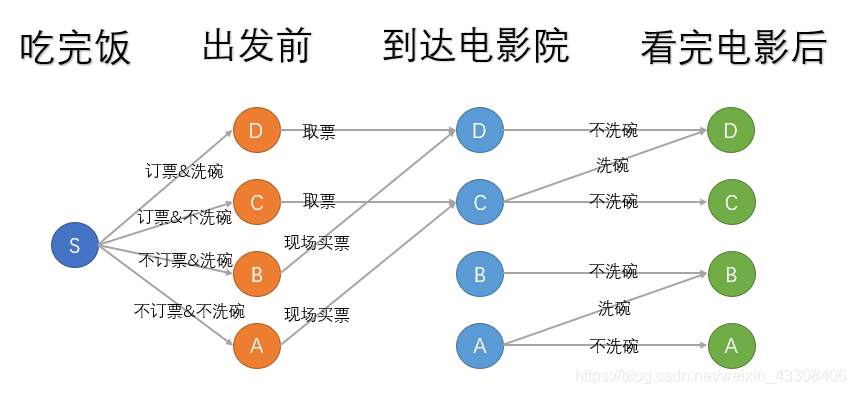
1.寻找划分阶段,也就是上图中的几个标题大字.
2.来分析状态,也就是上图中的圆圈.
3.确定状态转移,也就是连接圆圈之间的有向箭头.
4.初始状态 也就是状态 S,这个也是由问题确定的。
3.动态规划问题性质
1.三个动态规划需要满足的性质
接下来,我们了解三个动态规划状态需要满足的性质:
- 最优子结构:一个最优化策略的子策略总是最优的,反过来,我们可以通过最优的子策略,推出最优策略。
- 无后效性:当我们通过一系列策略到达了某一阶段的某一状态时,下一步决策不受之前的一系列策略影响,仅由当前状态决定。
- 子问题重叠:算法计算的过程中会反复地求解相同的一定量的子问题,而不是不断生成没有见过的新问题。也就是说子问题空间不大,或是状态空间不大,我们可以通过存储状态的答案加快计算速度。
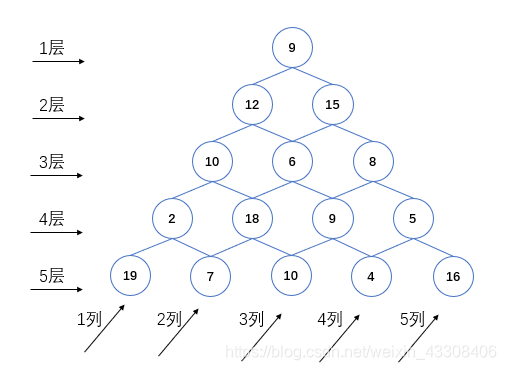
eg: 拿动态规划的经典问题数塔来举例子:有如下所示的数塔,要求从顶层走到底层,若每一步只能走到相邻的结点,则经过的结点的数字之和最大是多少?
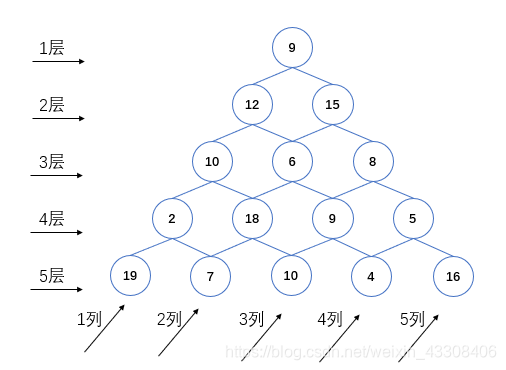
首先考虑上一节所说的状态表示与转移,我们先找一组符合动态规划要求性质的表示与转移:
- 阶段:数塔的每一层就是一个阶段,转移的时候,从上一层向下一层转移。
- 状态:位于数塔每一层的那个节点就是状态,因为每一步只能走到相邻的节点,所以状态决定了能够向下一阶段的哪些状态转移。
- 状态转移:由题目中 每一步只能走到相邻的结点得到,状态转移就是上一层节点向下一层相邻节点转移。
- 初始状态:由题目中得到,数塔顶部节点。
如此,我们的可以由阶段和状态得到:
- 状态表示:dp[i] [j]表示位于第 i 层第 j 个元素的最大数字之和
- 状态转移即为 dp[i] [j] = max(dp[i-1] [j-1], dp[i-1] [j]) + v[i] [j]
- 初始状态为 dp[1] [1] = 9。
对照着性质一条一条看,分析以下动态规划的性质:
如果我们当前在状态 (i,j)(即第 i 行第 j 列,下同),我们只能从状态 (i−1,j−1) 与状态 (i−1,j) 走过来,(i,j) 的最优决策一定能由它的两个子决策 (i−1,j−1) 与 (i−1,j) 推导出来,这就满足了最优子结构性质。反应到状态转移方程中,我们就可以放心的令 dp[i] [j] = max(dp[i-1] [j-1], dp[i-1] [j]) + v[i] [j]。(因为不关系具体决策序列,只关心结果,我们将最优决策得到的数字之和存储与 dpd**p 数组中)
当我们在状态 (i,j) 的时候,我们考虑状态 (i−1,j−1) 或状态 (i−1,j) 走过来,无需在多考虑之前是怎么走到(i−1,j−1) 或是(i−1,j−1) 的,这就是无后效性。其实,后效性这东西和状态表示是密切相关的,如果你发现你的状态表示存在后效性,那么把没考虑的东西加入状态表示中去,那么这个后效性的就消除了。解决动态规划问题的时候,我们需要寻找一个满足无后效性的最简状态表示。
整个问题的子问题其实只有 n(n+1)/2 种,子问题空间有限,是 O(n^2) 级别的。
2.反面教材(不满足性质)
然后,我们看两种反面教材:
状态表示为 dp[i] 表示位于第 i 层的最大数字之和,这种状态表示具有后效性,因为我们从上层往下层转移的时候,因为受到题中移动的相邻节点限制且状态中不知道相邻信息,没办法直接通过 dp[i−1] 转移到 dp[i]。我们需要多记录一维层内位置来消除后效性。
状态表示为 dp[a,b,c,d,e] 第一层走节点 a,第二层走节点 b,……,第五层走节点 e 的最大数字和。状态唯一的表示了每一种数塔行走的情况,不存在子问题重叠了,这样子问题数量增加至 n!,无法接受。
将题目更改为求从上向下的数字路径上的最大值最小值之差,那么使用 dp[i] [j]表示走到第 i 层第 j 个元素的最大值最小值之差就不符合最优子结构了,即使(i,j),只能从状态 (i−1,j−1) 与状态(i−1,j) 走过来且 (i−1,j−1) 与(i−1,j) 最优,我们也无法通过 (i−1,j−1) 与 (i−1,j) 的结果推出(i,j) 的最优决策,想想这是为什么~
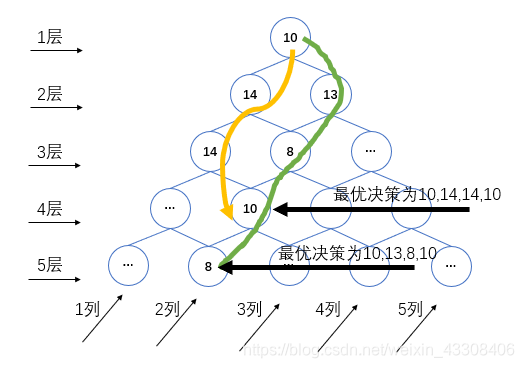
假设下图的情形,我们不考虑其他节点的值(假设其他都不是最优的),对于状态 (4,2)(4,2),两种路径:[10, 14, 14, 10] 的差为 4,[10, 13, 8, 10]的标准差为 55,显然最优决策为橙色箭头标识。状态 (5,2)(5,2) 的数字为 8,从 (4,2)(4,2) 的最优决策 [10, 14, 14, 10转移过来,显然不如从非最优决策 4,[10, 13, 8, 10] 转移。([10, 14, 14, 10, 8] 差为 6,[10, 13, 8, 10, 8] 差为 5)此状态的最优策略并非从子最优决策推得,反而是从非最优子决策得到的,这就是不符合最优子结构性质。
一般来说,求最大值、最小值这种目标式单调的问题,最优子结构性质是符合的,求什么绝对值、标准差、差值之类的,前期结果雪崩,到最后一步力挽狂澜的问题,最优子结构不能符合。
4.动态规划 题目特点
动态规划原本是用来解决求最值这类的最优化问题的,后人将其原理直接应用于计数、存在性判定(本质上也是计数)一类的问题也能够 work,所以如果你看到最值、计数(满足什么要求的方案数是多少?)、存在性判定(满足这个的方案存不存在?)这三类问题,不妨思考一下使用动态规划来解决。
再看数塔问题,同样要求从顶层走到底层,若每一步只能走到相邻的结点,最值就是求走出一条路径的最大数字和是多少,计数可以是求走出一条路径数字和不超过 55 的方案数,存在性判定可以是求是否存在一条路径的数字和等于 55。
5.动态规划代码实现
两种写代码的方式:记忆化搜索与递推。我认为记忆化搜索是一种相对容易理解好上手的代码方式,递推需要考虑更多的东西,优点是支持加入各种高级优化。
1.记忆化搜索
先说记忆化搜索,我认为这是一个相对简单的动态规划实现方法。它可以理解为在我们确定的状态上进行搜索,然后通过一个额外的数组保存每一个状态的答案,搜索某一个状态时,如果答案计算过就直接返回,否则继续向下搜索并保存计算过的答案!所以,点了搜索技能点的同学可以快速转型到记忆化搜索,它的好处有以下几点:
- 能避免计算一些根本用不到的状态。
- 决策边界容易考虑,搜不下去就是边界。
- 减少思考量,不用考虑状态之间的计算顺序,程序只需要立足当前状态与当前状态的子状态即可。
- 实现容易,写出搜索,加个记忆化就完事了。
- 可以使用搜索的奇技淫巧优化。
因为记忆化搜索存在一个搜索的框架,所以可以写出一个比较抽象的模板:
int dp[状态表示];
public int dfs(状态表示){
if (决策边界) return 决策边界;//决策边界
if (dp[状态表示] != 无效数值) return dp[状态表示];// 记忆化
for (当前状态表示的 子状态) dfs(子状态) 更新 dp[状态表示];//状态转移
return dp[状态表示];
}
public int slove(){
return dfs(原问题状态);
}
2.递推
再讲递推,简单了说是使用 For 循环嵌套对所有状态进行枚举,使用转移方程更新状态。
这里枚举状态的顺序就有讲究了,比如我们更新状态 A,需要状态 B、C、D 的答案,那么状态 B、C、D 肯定要先于状态 A 被我们枚举到,换句话说,确定状态 A 的时候,状态 B、C、D 必须已经被确定完了。一般来说,我们按照阶段地顺序枚举状态就可以了,但是很多时候问题情况比较复杂,按照阶段未必时最简单最容易实现的方法,所以枚举状态的顺序需要仔细思考。虽然,递推的实现方法相对记忆化搜索困难,但是他也有优点:
- 可以加入各种动态规划优化
- 没有记忆化搜索中系统栈的开销,速度较快
6.动态规划解答例题
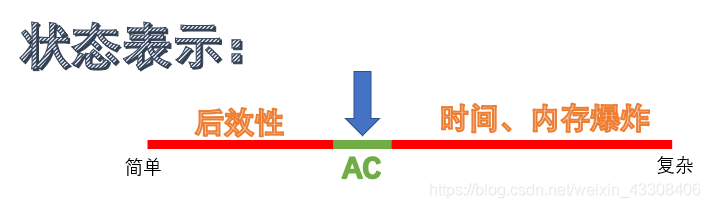
动态规划的核心就是状态表示,我们要确定一个既不是那么复杂导致超时,又不过于简单产生后效性的合理状态表示。有了一个合理的状态表示之后,转移方程、决策边界和代码实现都是稍加思考就能得到了。
Step 1 确定状态表示,包含阶段划分与状态表示 Step 2 写出转移方程:帮助你想清楚状态之间到底是如何转移的 Step 3 确定边界:初始 Cases! Step 4 如果使用递推,考虑一下子状态枚举的顺序。
另外,一件重要的事情是:想清楚了再写代码、想清楚了再写代码、想清楚了再写代码!
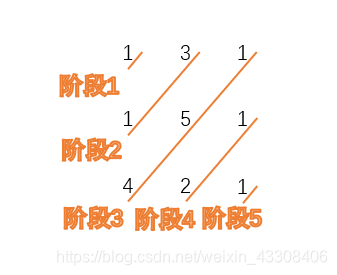
做道例题:64. 最小路径和
给定一个包含非负整数的 m x n 网格,请找出一条从左上角到右下角的路径,使得路径上的数字总和为最小。
说明:每次只能向下或者向右移动一步。
输入:
[
[1,3,1],
[1,5,1],
[4,2,1]
]
输出: 7
解释: 因为路径 1→3→1→1→1 的总和最小。
先确定状态表示,这道题目里的阶段比较隐式,它是斜过来在对角线上的元素。想想为什么,阶段 1 是从距离起点 0 步的位置,阶段 2 是距离起点 1 步的位置……我们总是从上一个阶段的状态向下一个阶段的状态进行更新。
那么,在每一个阶段中,我们需要知道它的具体位置,即斜线上的第几个,我们可以令 dp[i][j]表示在阶段 i 位于从上向下第 j 个的最小路径和。这样定义状态是可以将此题做出来的,但是会带来很多实现上的麻烦。 我们也可以令 dp[i][j]表示位于网格第 i 行第 j 列的最小路径和,这样阶段等于i+j,依旧能隐式地表示阶段。、
状态转移方程,由题目中 每次只能向下或者向右移动一步 这句话得到,也就是 (i,j) 可以从 (i−1,j) 与 (i,j−1) 走过来,那么转移方程就是 dp[i] [j] = min(dp[i-1] [j], dp[i] [j-1]) + grid[i] [j]。
决策边界,棋盘只有一个起点,所以 dp[0] [0] = grid[0] [0]。如果超出棋盘,也是不行的。
1.记忆化搜索的代码
class Solution {
public int minPathSum(int[][] grid) {
//行边长度:
int m = grid.length;
//纵边长度:
int n = grid[0].length;
int[][] dp = new int[m][n];
dp[0][0] = grid[0][0];
//初始化:
for(int i = 1;i<m;i++){
dp[i][0] = dp[i-1][0]+grid[i][0];
}
for(int j=1;j<n;j++){
dp[0][j] = dp[0][j-1]+grid[0][j];
}
//转义方程:
for(int i =1;i<m;i++){
for(int j =1;j<n;j++){
dp[i][j] = Math.min(dp[i-1][j],dp[i][j-1])+grid[i][j];
}
}
return dp[m-1][n-1];
}
}
//3ms
class Solution {
public int minPathSum(int[][] grid) {
if(grid.length == 0) return 0;
int m = grid[0].length, n = grid.length;
return minPathSumDfs(m, n, new int[n][m], grid);
}
private int minPathSumDfs(int m, int n, int[][] cache, int[][] grid){
// 搜不下去就是边界
if(m == 1 && n == 1) return grid[n - 1][m - 1];
if(m < 1 || n < 1) return Integer.MAX_VALUE;
// 记忆化
if(cache[n-1][m-1] != 0 ) return cache[n-1][m-1] - 1;
// 状态转移
int sum = Math.min(minPathSumDfs(m - 1, n, cache, grid), minPathSumDfs(m, n - 1, cache, grid));
cache[n-1][m-1] = sum + grid[n - 1][m - 1] + 1;
return cache[n-1][m-1] - 1;
}
}
// 1ms
2.递推代码
如果想要使用递推,我们还需要考虑枚举状态的顺序,这里可以从向往下枚举,从左往右枚举,因为一个更新一个状态,需要它右侧与它上边状态的答案,如此枚举可以保证一个状态在被更新时,他需要的状态已经被更新完毕了。而决策也相对更难考虑,在递推中做不到像搜索那样,搜不下去就是边界,我们需要人为地将第 0 行与第 0 列的元素都都作为决策边界。
class Solution {
public int minPathSum(int[][] grid) {
int n = grid.length, m = grid[0].length;
int dp[][] = new int[n][m];
// 决策边界
dp[0][0] = grid[0][0];
for (int i = 1; i < n; i++) dp[i][0] = dp[i - 1][0] + grid[i][0];
for (int j = 1; j < m; j++) dp[0][j] = dp[0][j - 1] + grid[0][j];
// 状态转移
for (int i = 1; i < n; i++){
for (int j = 1; j < m; j++){
dp[i][j] = Math.min(dp[i - 1][j], dp[i][j - 1]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
}
7.总结
- 动态规划以状态表示为核心,需要确定转移方程与边界情况
- 满足三条基本性质:最优子结构、无后效性、子问题重叠
- 解决最值、计数、存在性判定三类问题
- 使用记忆化搜索或递推地方式实现
8.Q&A
Q1:如何提升动态规划能力? A1:两个办法:练习与积累。(a) 多做题,锻炼用状态描述问题,转移解决问题地思维。(b) 通过了解经典的动态规划类型,积累状态表示与转移的经验。
Q2:动态规划边界情况总是弄不清楚怎么办? A2:(a) 想清楚了再写代码 (b) 用记忆化搜索的实现方式 (c) 强迫自己在纸上写出一些内容
原文: HTTPS://WNJXYK.KEJI.MOE/ALGORITHM/ALGORITHM-ABC-DYNAMIC-PROGRAMMING-INTRODUCTION/
comments powered by Disqus [算法 java基础] [基础]